SIR model using Octave and LSODE
Octave requires a function that returns the gradient of the system, given the current state of the system, x and the time, t.
function xdot = sir_eqn(x,t)
% Parameter values
beta=0.1;
mu=0.05;
% Define variables
s = x(1);
y = x(2);
r = x(3);
% Define ODEs
ds=-beta*s*y;
dy=beta*s*y-mu*y;
dr=mu*y;
% Return gradients
xdot = [ds,dy,dr];
endfunction
We then set up the time axis over which to integrate and the initial conditions.
t = linspace(0, 200, 2001)+.1;
x0=[0.99,0.01,0];
The function lsode can be used to solve ODEs of this form using Hindmarsh’s ODE solver LSODE.
x = lsode("sir_eqn",x0, t);
The following saves the times and the states.
out=[transpose(t),x];
save -ascii sir_octave.out out;
!head sir_octave.out
1.00000000e-01 9.90000000e-01 1.00000000e-02 0.00000000e+00
2.00000000e-01 9.89900759e-01 1.00491165e-02 5.01241223e-05
3.00000000e-01 9.89801042e-01 1.00984640e-02 1.00494189e-04
4.00000000e-01 9.89700844e-01 1.01480441e-02 1.51112049e-04
5.00000000e-01 9.89600163e-01 1.01978578e-02 2.01979039e-04
6.00000000e-01 9.89499005e-01 1.02479029e-02 2.53092305e-04
7.00000000e-01 9.89397349e-01 1.02981882e-02 3.04462323e-04
8.00000000e-01 9.89295211e-01 1.03487075e-02 3.56081707e-04
9.00000000e-01 9.89192584e-01 1.03994631e-02 4.07953352e-04
1.00000000e+00 9.89089464e-01 1.04504565e-02 4.60079036e-04
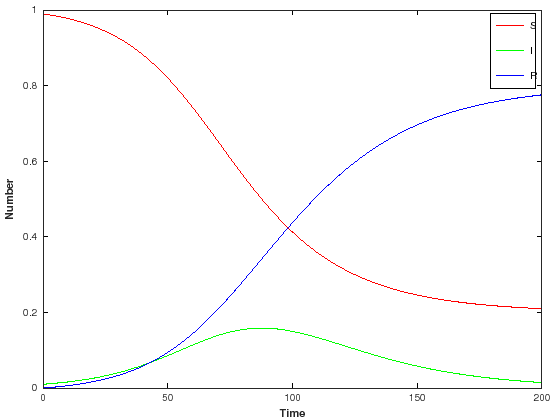
Visualisation
plot(t,x(:,1),"-r",t,x(:,2),"-g",t,x(:,3),"-b")
xlim([0 200])
xlabel("Time","fontweight","bold")
ylabel("Number","fontweight","bold")
h = legend("S","I","R");
legend(h,"show")